產品中心
我們很樂意為您提供服務!
 133 3183 5800
133 3183 5800
135 0190 3641
 sxd@weimijy.cn
sxd@weimijy.cn
產品特征
◇ 高性能,高可靠性,高兼容性
◇ 采用自主研發全自動溫度及線性修正系統模批量生產
◇ -40~85℃全溫度段溫度補償
◇ ±30°范圍精密修正,典型誤差0.03°
◇ 多種輸出接口可選
◇ 9~30VDC寬電壓供電,內置過壓過流保護
◇ 優異的三防處理,防護等級達到IP67
◇ 非常高的性價比
產品應用
★ 精密加工 ★ 智能樓宇 ★ 平臺調節 ★ 海底勘探 ★ 過程控制 ★ 試驗設備 ★ 疏浚機械
型號選擇及對應參數
VLM | — | X | X | X | X | X | — | XX | ||||||
廠牌 | 連接符 | 產品類型 | 軸向 | 精度 | 輸出方式 | 電纜接頭 | 連接符 | 測量范圍 | ||||||
VLP傾角 傳感器
| — | T | 靜態 | D | 雙軸 | 1 | 0.1° | 1 | RS232-TTL | P | PG7電纜頭 | — | 5 | ±5° |
D | 動態 | S | 單軸 | 2 | 0.05° | 2 | 標準RS232 | M | M12接插件 | 10 | ±10° | |||
3 | 0.01° | 3 | RS485 | O | 模塊 | 15 | ±15° | |||||||
4 | 0.005°) | 4 | 4~20mA | 30 | ±30° | |||||||||
5 | 0.003° | 5 | 0~5V | 45 | ±45° | |||||||||
6 | 0.001° | 6 | RS422 | 60 | ±60° | |||||||||
7 | CAN2.0B | 90 | ±90° | |||||||||||
8 | LORA無線 | |||||||||||||
9 | 以太網 | |||||||||||||
選型示例:您需要維錸金屬封裝的靜態雙軸傾角傳感器,精度0.05°,測量范圍30°,RS485輸出MODBUS RTU協議,PG7的電纜接頭,您可以選擇:VLM-TD23P-30。
通用性能參數
參數名稱 | 對應參數 | 單位 | 備注 | |||||
測量精度 | 0.1 | 0.05 | 0.01 | 0.005 | 0.003 | 0.001 | ° | |
分辨率 | 0.01 | 0.01 | 0.005 | 0.003 | 0.001 | 0.0005 | ° | |
非線性 | 0.3 | 0.2 | 0.05 | 0.05 | 0.05 | 0.05 | %FS | |
零點溫漂 | 0.003 | 0.0015 | 0.0015 | 0.0006 | 0.0005 | 0.0002 | °/℃ | 全溫段溫度補償 |
靈敏度誤差 | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 | 0.3 | %FS | 僅模擬輸出有效 |
響應時間 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | s | |
重量 | 約200 | g | ||||||
電氣及環境參數
參數名稱 | 小值 | 典型值 | 大值 | 單位 | 備注 |
供電電壓 | 9 | 12 | 30 | VDC | 內置30VDC過壓保護 |
消耗電流 | 12 | 15 | 18 | mA | 空載電流 |
工作溫度 | -40~85℃ | ||||
儲存溫度 | -55~105℃ | ||||
防護等級 | IP67(可提供IP68及以上封裝) | ||||
振動 | 500g, 0.15msec, 1/2 sine | ||||
沖擊 | 1000g@11ms | X、Y、Z每軸向各3次 | |||
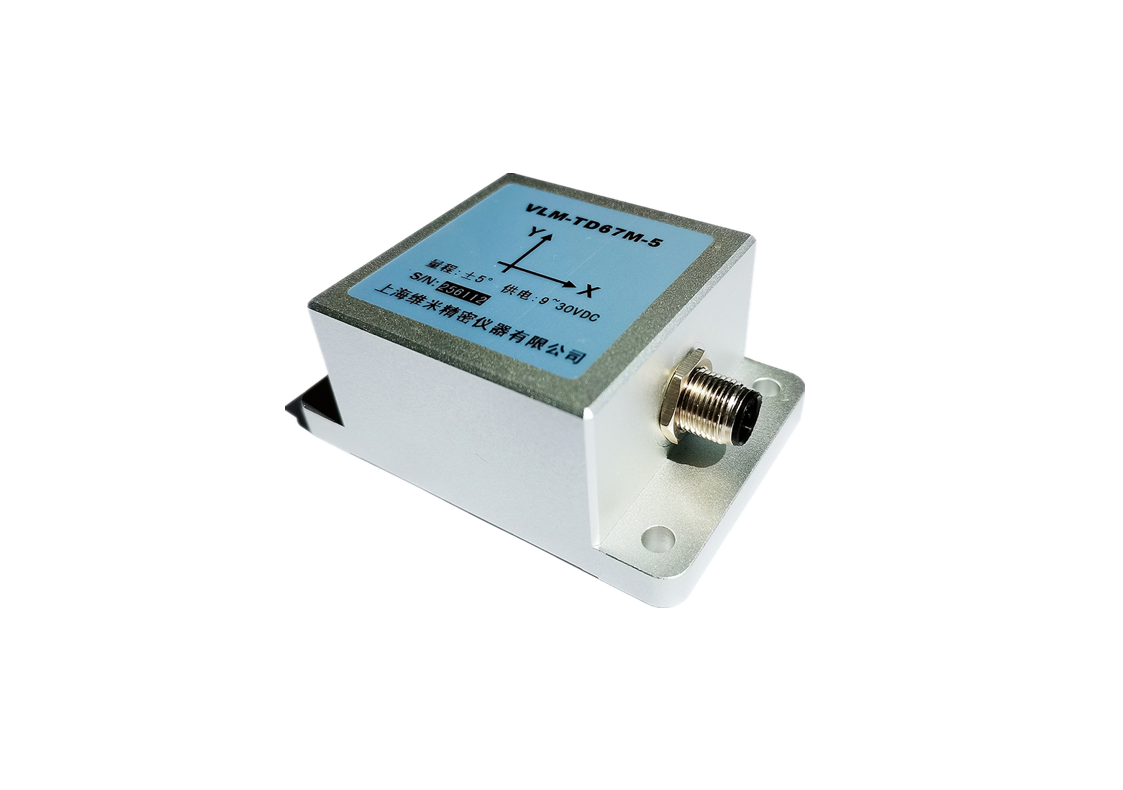
結構圖及接線定義



軸向指示說明
 雙軸,X&Y軸,箭頭高于箭尾角度為正。
雙軸,X&Y軸,箭頭高于箭尾角度為正。
 單軸,僅X軸,箭頭高于箭尾角度為正。
單軸,僅X軸,箭頭高于箭尾角度為正。
 單軸,垂直安裝,出線口豎直向下,默認0~360°。
單軸,垂直安裝,出線口豎直向下,默認0~360°。
聯機通訊
ASCII碼通訊協議(適用于RS232 or RS485)
1.串口參數:115200(默認),n,8,1。
2.數據格式:(雙軸) X:+12.35;Y:-03.94
“X:”后面跟的是X軸角度,”Y:”后面跟的是Y軸角度,若為全方位輸出,則為“A:”,數據固定長度。其中,
“
3. 傳感器設置命令:
序號 | 命令內容 | 功能 |
1 | $za | 將傳感器當前位置作為零點,設置成功后傳感器輸出為0 |
2 | $br=1 | 將波特率設置為9600,0—4800,1—9600,2—19200,3—38400,4—57600, 5—115200,6—230400,7—460800,8--921600 |
3 | $oc=0 | 傳感器停止串口輸出,0—停止輸出,1—連續輸出 |
4 | $up=1 | 設置串口輸出頻率為10Hz,0—5Hz, 1—10Hz,2—15Hz,3—20Hz, 4—25Hz,5—33Hz,6—50Hz |
注:所有設置命令設置成功后傳感器返回“Set OK!
十六進制通訊協議
1. 串口參數:115200(默認),n,8,1。
2. 數據格式:十六進制,如下表
字節 | D0 D1 | D2 | D3 | D4 | D5 D6 | D7 D8 | D9 D10 | D11 |
內容 | A5 5A | 0C | 00 | yz | 021C | FE65 | 0129 | XX |
說明 | 幀頭 | 幀長 | 命令字 | 控制字 | X軸數據 | Y軸數據 | 溫度數據 | CKM |
幀頭 ——固定為A5 5A。
幀長 ——根據本幀數據包含的內容改變,單軸該字節為0x08,雙軸為0x0A;三軸為0x0C。
命令字——固定內容,本傳感器中為00。
控制字——yz,y表示傳感器序列,z表示分辨率(小數位數),本傳感器中為12。
幀長 ——本幀字節個數(包含幀頭和幀尾),單軸該字節為0x08,雙軸為0x0a;三軸為0x0c。
X軸數據 —有符號的短整形數,MSB在前,數據范圍-32000~+32000;Y軸和溫度數據類型與此相同。
CKM ——本幀數據除CKM自身外所有字節的累加和之低8位(D0+D1+D2+…+D10)。
數據解算舉例:0xa5 0x5a 0x0c 0x00 0x12 0xf3 0x14 0x01 0x87 0x01 0x09 0xb6
從上述數據可以看出,傳感器系列屬于1,角度分辨率為0.01,溫度分辨率恒定為0.1,解算過程:
因X軸數據大于0x7fff,所以X軸數據為負值,故X軸角度=(0xffff – 0xf314 + 1)* 0.01= -33.08
Y軸角度=0x0187 * 0.01 = 3.91 溫度= 0x0109 * 0.1 = 26.5
MODBUS-RTU通訊協議
1.串口參數:9600(默認),n,8,1。 2.數據寄存器地址如下表(傳感器ID默認為01,可設置的最大ID為32,上位機命令的起始寄存器地址與數據個數不能大于3,否則返回地址超限錯誤 01 83 02 C0 F1):
寄存器地址 | 00 | 01 | 02 |
內容 | X軸角度 | Y軸角度 | 溫度 |
1.讀傳感器寄存器01和02命令: 01 03 00 01 00 02 95 cb 本例是從1號寄存器開始,讀取2個寄存器 。 2.將指定寄存器清零: 01 06 00 01 00 00 d8 0a 將寄存器1清零,成功返回本指令數據,否則超時。 3.更改ID號: 01 1f 00 5a 00 05 74 18 將ID號更改為05, 成功返回本指令數據,否則超時。 4.修改波特率: 01 20 00 5a 00 04 a1 dd 將波特率修改為57600(見ASCII碼協議中波特率對應關系),成功返回本指令數據,否則超時。 5.設置更新率: 01 1e 00 5a 00 05 49 d8 將傳感器更新率設置為100/05=20Hz。
MODBUS通訊注意事項
a、 不要經常修改傳感器的ID號,若修改了ID號,請做好記錄,以免忘記ID造成無法調試。
b、 不要經常修改波特率,若修改了波特率,請做好記錄,以免忘記波特率造成無法調試。
c、 MODBUS校驗要求低字節在前,高字節在后,無論修改了CRC前的任何一個字節,都需要重新計算CRC值。
調試軟件使用方法
USB配置線驅動安裝方法:
1、解壓縮文件“Tilt Switch A1設置軟件及驅動.rar”。
2、在剛才解壓縮出來的文件夾內找到“CH340驅動(USB串口驅動)_XP_WIN7共用”文件夾并打開。
3、找到“SETUP.EXE”文件,鼠標右鍵點擊該文件選擇“以管理員身份運行(A)”,如下圖:

4、在彈出的對話框鼠標左鍵點擊“安裝”,如下圖:

5、等待幾秒鐘將安裝成功,彈出如下界面,鼠標左鍵點擊“確定”,并關閉“驅動安裝(X64)”對話框。

6、將USB設置線插入電腦的USB口,系統自動會完成驅動的安裝。
7、在電腦桌面上找到“計算機”,鼠標右鍵點擊“計算機”,并選擇“屬性”,如下圖:

8、在彈出的對話框內鼠標左鍵點擊“設備管理器”,如下圖:

9、在彈出的對話框內查看 “端口”的細節內容,找到“CH340”字樣括號內的字母(本例為中“COM6”),如下圖:

10、打開“Tilt Switch A1設置.exe”,將下圖位置端口號選擇成與步驟9中看到的括號內的內容一致, 并點擊
“打開串口”,如果打開成功,左側狀態變為綠色,且內有“打開”字樣,按鈕文字變為“關閉串口”如下圖:

11、點擊3號方框位置選擇與傳感器對應的分辨率。X、Y后面的數據將隨著傾角傳感器的姿態變化而變化。如果沒
有數據顯示,則可能通訊不正常,請檢查通訊線路是否有故障和驅動程序是否正確安裝。
注:本調試軟件僅支持本公司生產的十六進制格式輸出協議。